 自检时间与自检到故障后其拒绝时间之和为 TD,则其失效分布函数分别为:
自检时间与自检到故障后其拒绝时间之和为 TD,则其失效分布函数分别为:
QF(t)= 1 - e -λFt,t≥0 (1)
QD(t)= 1 - e -λDt,t≥0 (2)
因此,由图 4 可得反应式故障-安全结构的失效分布函数 QS(t)为:
QS(t)=( 1 - e -λFt)( 1 - e -λDt),t≥0 (3)
则反应式故障-安全结构的可靠度分布函数 RS(t)为:
RS(t)= e -λFt + e -λDt - e -(λF + λD)t,t≥0 (4)
而反应式故障-安全结构失效密度函数 fS(t)(危害率 FRS(Reactive))为:
(5)
则上式(5)可作为反应式故障-安全结构危害率准确计算数学公式。
经简化后,可得:
fS(t)= FRS(Reactive)= 2 λF λD t (6)
通常,逻辑处理单元和故障检测单元检测到故障后拒绝所需时间远小于检测时间,同时,由于 TF>TD,则反应式故障-安全结构危害率为:
FRS(Reactive)= 2 λF λD TF (7)
则式(7)可作为反应式故障-安全结构危害率工程实用化计算公式。
2.2 2oo2 组合式故障-安全结构危害分析和危害率计算
在 2oo2 组合式故障-安全结构中,只有 A 单元和 B单元同时出现失效且两单元输出相同,才会导致危险侧输出,因此其安全性模型如图 5 所示。
分析 2oo2 组合式故障-安全结构安全性框图可知,在 2 取 2 表决单元正常情况下,A 单元和 B 单元工作状态组合形成 4 种输出,即:
(1)当 A、B 单元工作正常时,结构输出正常;
(2)当 A单元工作正常、B 单元故障时,结构由故障导向安全状态,输出安全状态信息;
(3)当 B 单元工作正常、A单元故障时,结构由故障导向安全状态,输出安全状态信息;
(4)当 A、B 单元均故障且输出危害一致时,则结构输出可能存在危害。
若 QA、QB 分别表示 A、B 单元输出,其输出正常和输出异常分别用 1 和 0 表示,2oo2 组合式结构输出存在潜在风险用 0 表示,不存在潜在风险用 1 表示,则其概率图如图 6 所示。
为了推导出 2oo2 组合式故障-安全结构危害率计算公式,作如下假设:
(1)A、B 单元的失效率函数满足指数分布,参数通常均相同,为 λ;
(2)2 取 2 表决单元可靠性为 1;
(3)所识别的危害均为安全相关危害;
(4)A、B 单元故障检测时间均相同,其和为 T。
则 A、B 单元失效分布函数均为:
QA(t)= QB(t)=Q(t)=1 - e -λt,t≥0 (8)
其中,t 为 A、B 单元故障检测时间与故障检测到后拒绝时间之和。
因此,由图 6 可得 2oo2 组合式故障-安全结构失效分布函数为:
QS(2oo2)(t) = QA(t)· QB(t)=1 - 2 e -λt + e -2λt,t≥0(9)
则 2oo2 组合式故障-安全结构的可靠度分布函数RS(2oo2)(t) 为:
RS(2oo2)(t) = 2 e -λt - e -2λt,t≥0 (10)
而 2oo2 组合式故障-安全结构失效密度函数 fS(2oo2)(t)为(危害率为 HRS(2oo2)(t)):
(11)
化简后得:
fS(2oo2)(t) = HRS(2oo2)(t) = 2 λ2t,t≥0 (12)
通常 A、B 单元故障检测到故障后拒绝所需时间远小于检测时间,因此 2oo2 组合式故障-安全结构的危害率为:
HRS(2oo2) = 2 λ2T (13)
则式(13)可作为 A、B 单元参数均为 λ 的 2oo2 组合式故障-安全结构危害率工程实用化计算公式。
当 A、B 单元的参数不同,分别为 λA 和 λB,检测时间分别为 TA 和 TB 时,式(13)为:
HRS(2oo2) = λA λB(TA + TB) (14)
则式(14)可作为 A、B 單元参数不同的 2oo2 组合式故障-安全结构危害率工程实用化计算公式。
假设 ,式(13)变换为:
(15)
式(15)中,SDRA、SDRB 分别为 A、B 单元的宕机率。
则式(15)也可作为 A、B 单元参数不同的 2oo2 组合式故障-安全结构危害率工程实用化计算公式。
3 故障-安全结构危害率仿真分析
3.1 反应式故障-安全结构危害率仿真分析
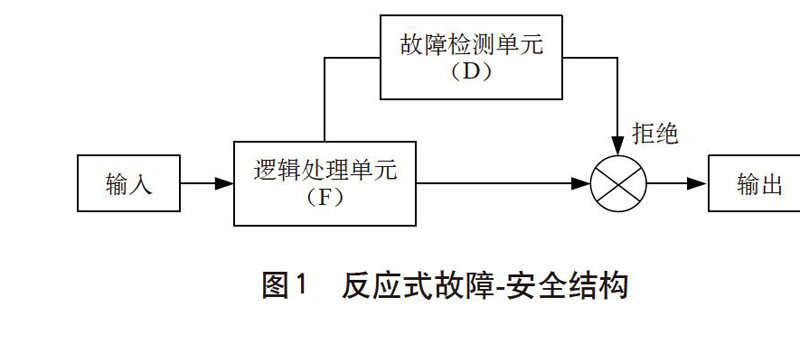
图 1 所示的反应式故障-安全结构中,选择逻辑处理单元和故障检测单元所服从指数分布的参数 λF 和 λD 分别为 5×10-6 h-1 和1×10-6 h-1 ,则依据公式(5)和(7)得到反应式故障-安全结构危害率fs(t)和 FRS(Reactive)随着检测时间 TF 的变化曲线如图 7 所示。
从图 7 所示反应式故障-安全结构危害率曲线,可以得到以下结论。
(1)当 T≤10 000 h 时,公式(7)中所呈现危害率-时间关系为线性关系,与公式(5)基本接近。
(2)公式(5)中危害率随着时间的增加而增加,逐渐呈现收敛趋势。
(3)当检测和拒绝时间很长时,公式(7)的计算值偏离公式(5)计算所得的准确值越来越大,而公式(5)更加接近实际值。
3.2 2oo2 组合式故障-安全结构危害率仿真分析
图 2 所示的 2oo2 组合式故障-安全结构中,选择 A、B 所服从指数分布的参数 λ 均为 1×10-6 h-1,则依据公式(11)和(13)得到 2oo2 组合式故障-安全结构危害率 fS(2oo2)(t) 和 HRS(2oo2)随着检测时间 T 的变化曲线如图 8 所示。
从图 8 所示 2oo2 组合式故障-安全结构危害率曲线,可以得到以下结论。
(1)当 T≤10 000 h 时,公式(13)中所呈现的危害率-检测时间为线性关系,且与公式(11)基本接近。
(2)公式(11)中危害率随着检测时间的增加而增加,并逐渐呈现收敛趋势。
(3)当检测和拒绝时间很长时,公式(13)的计算值偏离公式(11)计算所得的准确值越来越大,而公式(11)更加接近实际值。
4 结束语
本文所推导出的反应式和 2oo2 组合式故障-安全结构的危害率计算公式,不仅能够对安全相关系统或产品的设计参数选择(如检测时间等)、参数匹配设计及其可维护指标性确定提供理论依据,也为安全关键产品/系统的安全性预计提供了有效计算方法,具有较好的指导性和实用性。
参考文献
[1] 曹晋华. 程侃著可靠性数学引论(修订版)[M]. 北京:高等教育出版社,2006.
[2] 马文 · 劳沙德. 系统可靠性理论:模型、统计方法及应用[M]. 郭强,王秋芳,刘树林,译. 2版. 北京:国防工业出版社,2010.
[3] Jirí Konecny. Hazard rate of redundant structure 2oo2[D]. Pardubice :University of Pardubice,2009.
[4] IEC 61508:2010 Functional safety of electrical/electronic/programmable electronic safety-related systems[S]. 2010.
[5] GB/T 28809-2012 轨道交通 通信、信号和处理系统 信号用安全相关电子系统[S]. 2012.
[6] GB/T 28809-2012 轨道交通 通信信号及处理系统-安全电子信号系统[S]. 2012.
[7] GB/T 28808-2012 轨道交通 通信信号及处理系统 控制和防护系统软件[S]. 2012.
[8] CLC/TR 50506-1 : 2007 轨道交通 通信、信号和处理系统-EN 50129的应用指南第1部分:相互认可[S]. 2007.
[9] GB/T 20438.1-2017 电气/电子/科编程电子安全相关系统的功能安全 第1部分:一般要求(IEC 61508-1:2010,IDT)[S]. 2017.
[10] GB/T 20438.2-2017 电气/电子/科编程电子安全相关系统的功能安全 第2部分:电气/电子/科编程电子安全相关系统的要求(IEC 61508-2:2010,IDT)[S]. 2017.
[11] GB/T 20438.3-2017 电气/电子/科编程电子安全相关系统的功能安全 第3部分:软件要求(IEC 61508-3:2010,IDT)[S]. 2017.
[12] GB/T 20438.4-2017 电气/电子/科编程电子安全相关系统的功能安全 第4部分:定义和缩略语(IEC 61508-4:2010,IDT)[S]. 2017.
[13] GB/T 20438.5-2017 电气/电子/科编程电子安全相关系统的功能安全 第5部分:确定安全完整性等级的方法示例(IEC 61508-5:2010,IDT)[S]. 2017.
[14] GB/T 20438.6-2017 电气/电子/科编程电子安全相关系统的功能安全 第6部分:[10] GB/T 20438.2和GB/T20438.3的应用指南(IEC 61508-6:2010,IDT)[S]. 2017.
[15] GB/T 20438.7-2017 电气/电子/科编程电子安全相关系统的功能安全 第7部分:技术和措施概述(IEC 61508-7:2010,IDT)[S]. 2017.
收稿日期 2018-06-07
責任编辑 朱开明
相关热词搜索: 危害 轨道交通 识别 信号 系统故障